NEWS AND INFORMATION
新闻资讯
专业的团队技术服务
提供冲压伺服滚轮送料机、精密整平机、自动开卷机、分条机、机械手等研发和服务
苏州五斗机械有限公司

|
五斗 送料机 厂家和你细谈 工业机器人设计 和 工作原理工业机器人设计 工业机器人与机床的相同之处是二者的末端执行器都有位姿变化要求,都是通过坐标 运动来实现末端执行器的位姿变化,因此在运动功能设计方面二者有不少共同之处。与机 床相比,机器人对灵活性要求很高,其刚度、精度相对较低,因此在结构设计方面二者的 差别就比较大。机床是以直角坐标形式运动为主,而机器人是以关节形式运动为主,因此 二者的动力学分析及控制方面也有差别。本章主要介绍机器人运动描述、静力分析和动力 分析,为机器人传动系统设计和控制准备基础;总体设计;传动系统设计;结构设计;伺 服控制系统构成。
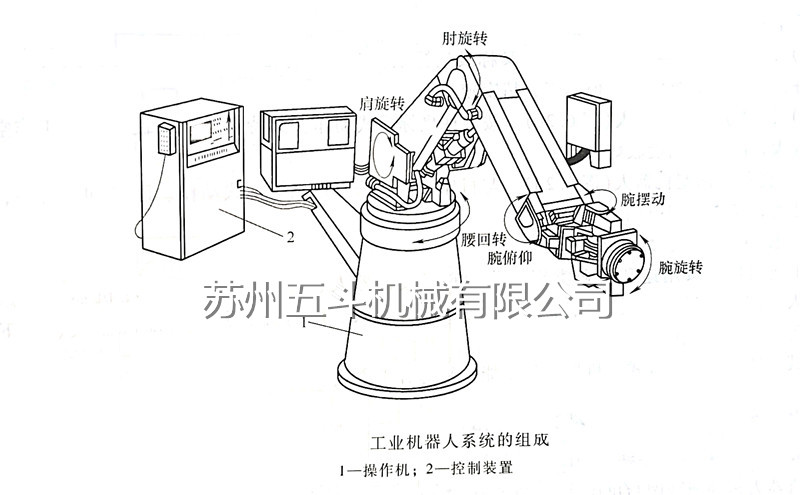
工业机器人的工作原理 工业机器人是一种生产装备,基本功能是提供作业所需的运动和动力,其基本工作原理是 通过操作机上各运动构件的运动,自动地实现手部作业的动作功能及技术要求。 如第2章所述,在基本功能及基本工作原理上,工业机器人与机床有如下相同之处:二者 的末端执行器都有位姿变化要求,如机床在加工过程中,刀具相对工件有位姿变化要求,机器 人的手部在作业过程中相对机座也有位姿变化要求;二者都是通过坐标运动来实现末端执行器 的位姿变化要求。二者的主要不同之处有:机床是以直角坐标形式运动为主,而机器人是以关 节形式运动为主;机床对刚度、精度要求很高,其灵活性相对较低;而机器人对灵活性要求很 高,其刚度、精度相对较低。 了解工业送料机、工业冲压床、工业机械人更多资讯请关注:http://www.wudoujx.net |